Title: EAARL Topography--Potato Creek Watershed, Georgia, 2010
Abstract:
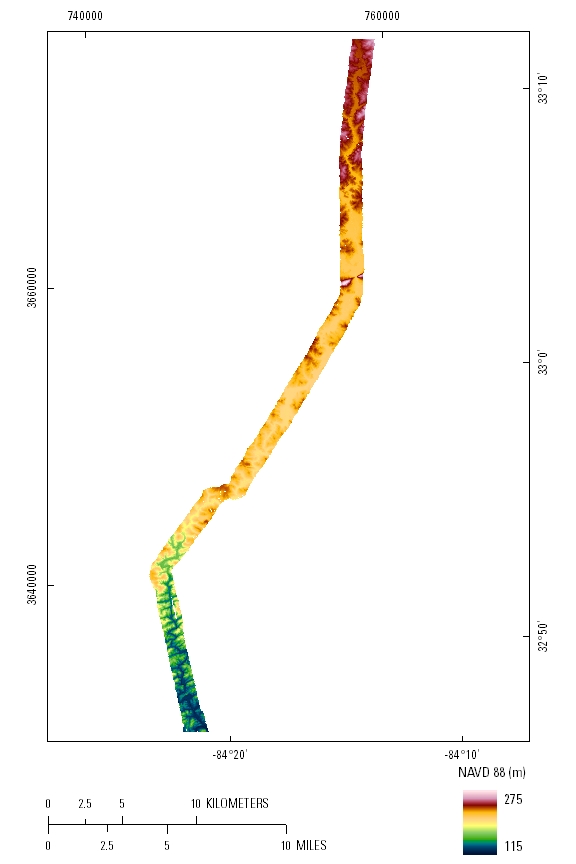
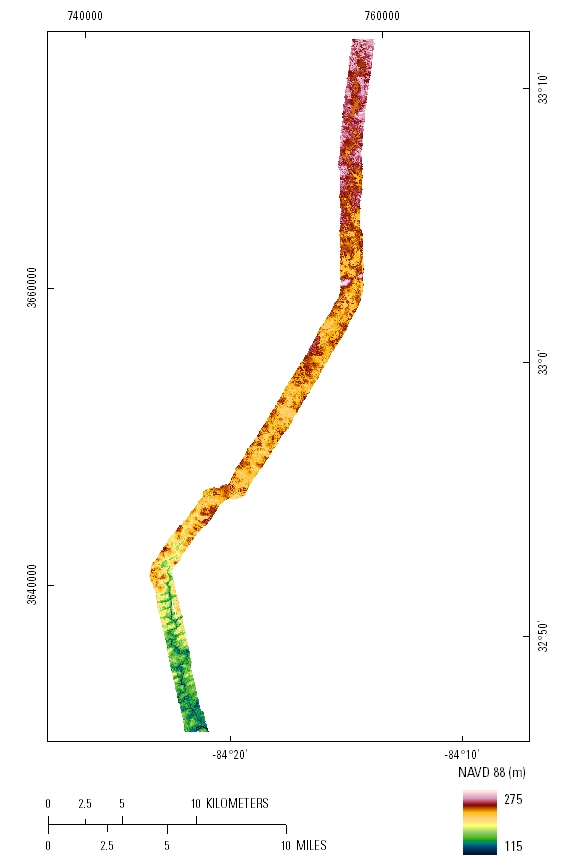
A digital elevation model (DEM) of a portion of the Potato Creek watershed in Georgia was produced from remotely sensed, geographically referenced elevation measurements by the U.S. Geological Survey (USGS). Elevation measurements were collected over the area on February 27, 2010, using the Experimental Advanced Airborne Research Lidar (EAARL), a pulsed laser ranging system mounted onboard an aircraft to measure ground elevation, vegetation canopy, and coastal topography. The system uses high-frequency laser beams directed at the Earth's surface through an opening in the bottom of the aircraft's fuselage. The laser system records the time difference between emission of the laser beam and the reception of the reflected laser signal in the aircraft. The plane travels over the target area at approximately 50 meters per second at an elevation of approximately 300 meters, resulting in a laser swath of approximately 240 meters with an average point spacing of 2-3 meters. The EAARL, developed originally by the National Aeronautics and Space Administration (NASA) at Wallops Flight Facility in Virginia, measures ground elevation with a vertical resolution of +/-15 centimeters. A sampling rate of 3 kilohertz or higher results in an extremely dense spatial elevation dataset. Over 100 kilometers of coastline can be surveyed easily within a 3- to 4-hour mission. When resultant elevation maps for an area are analyzed, they provide a useful tool to make management decisions regarding land development.
For more information on Lidar science and the Experimental Advanced Airborne Research Lidar (EAARL) system and surveys, see
http://ngom.usgs.gov/dsp/overview/index.php and
http://ngom.usgs.gov/dsp/tech/eaarl/index.php .
Raw lidar data are not in a format that is generally usable by resource managers and scientists for scientific analysis. Converting dense lidar elevation data into a readily usable format without loss of essential information requires specialized processing. The U.S. Geological Survey's Coastal and Marine Geology Program (CMGP) has developed custom software to convert raw lidar data into a GIS-compatible map product to be provided to GIS specialists, managers, and scientists. The primary tool used in the conversion process is Airborne Lidar Processing System (ALPS), a multi-tiered processing system developed by a USGS-NASA collaborative project. Specialized processing algorithms are used to convert raw waveform lidar data acquired by the EAARL to georeferenced spot (x,y,z) returns for "first surface" and "bare earth" topography. The terms first surface and bare earth refer to the digital elevation data of the terrain, but while the first-surface data include vegetation, buildings, and other manmade structures, the bare-earth data do not. The zero crossing of the second derivative (that is, detection of stationary points) is used to detect the first return, resulting in "first surface" topography, while the trailing edge algorithm (that is, the algorithm searches for the location prior to the last return where direction changes along the trailing edge) is used to detect the range to the last return, or "bare earth" (the first and last returns being the first and last significant measurable portion of the return pulse). Statistical filtering, known as the Random Consensus Filter (RCF), is used to remove false bottom returns and other outliers from the EAARL topography data. The filter uses a grid of non-overlapping square cells (buffer) of user-defined size overlaid onto the original point cloud. The user also defines the vertical tolerance (vertical width) based on the topographic complexity and point-sampling density of the data. The maximum allowable elevation range within a cell is established by this vertical tolerance. An iterative process searches for the maximum concentration of points within the vertical tolerance and removes those points outside of the tolerance (Nayegandhi and others, 2009). These data are then converted to the North American Datum of 1983 and the North American Vertical Datum of 1988 (using the GEOID09 model). Each file contains data located in a 2-kilometer by 2-kilometer tile, where the upper-left bound can be assessed quickly through the filename. The first 3 numbers in the filename represent the left-most UTM easting coordinate (e###000) in meters, the next 4 numbers represent the top-most UTM northing coordinate (n####000) in meters, and the last 2 numbers (##) represent the UTM zone in which the tile is located (for example, fs_e123_n4567_16).The development of custom software for creating these data products has been supported by the U.S. Geological Survey CMGP's Decision Support for Coastal Science and Management project. Processed data products are used by the U.S. Geological Survey CMGP's National Assessments of Coastal Change Hazards project to quantify the vulnerability of shorelines to coastal change hazards such as severe storms, sea-level rise, and shoreline erosion and retreat.
{kind=link}
{kind=link}