Online Links:
Online Links:
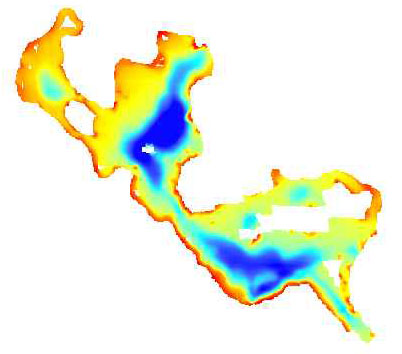
This grid represents approximately 37 kilometers of bathymetric data collected in 2005. These data were collected using an interferometric sonar (Systems Engineering and Assessment Ltd. (SEA) 2000 series) by the U.S. Geological Survey during USGS survey 2005-04-FA. These bathymetric data were used to define the morphology of the bay floor in Moultonborough Bay, Lake Winnipesaukee, New Hampshire as part of a collaborative USGS and New Hampshire Department of Environmental Services research program to assess the distribution of variable leaf water-milfoil. The morphology of the bay floor aids in defining the physical characteristics of specific benthic habitat environments within the bay.
Online Links:
Online Links:
Are there legal restrictions on access or use of the data?Access_Constraints: None.
Use_Constraints:These data are NOT to be used for navigation. Mariners should refer to the appropriate nautical chart. Public domain data from the U.S. Government are freely redistributable with proper metadata and source attribution. Please recognize the U.S. Geological Survey as the originator of the dataset.
Neither the U.S. Government, the Department of the Interior, nor the USGS, nor any of their employees, contractors, or subcontractors, make any warranty, express or implied, nor assume any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, nor represent that its use would not infringe on privately owned rights. The act of distribution shall not constitute any such warranty, and no responsibility is assumed by the USGS in the use of these data or related materials. Any use of trade, product, or firm names is for descriptive purposes only and does not imply endorsement by the U.S. Government.
| Data format: | Zip file containing the ArcRaster grid of swath bathymetric data from the Moultonborough Bay survey area. This also includes associated metadata. in format AIG (version ArcGIS 9.0) Esri Raster GRID format Size: 2.9 |
|---|---|
| Network links: |
https://cmgds.marine.usgs.gov/data/field-activity-data/2005-004-FA/data/bathymetry/winni_bathy.zip https://cmgds.marine.usgs.gov/data/field-activity-data/2005-004-FA/ https://doi.org/10.5066/F71N7Z4H |
These data are available as a ArcInfo 32-bit floating point binary grid in Esri format. The floating point binary grid and associated 'info' folder are stored in one folder 'grid' that has been compressed using WinZip (ver. 17.5) software. To utilize these data, the user must have software capable of uncompressing the zip file and importing and viewing an Esri ArcRaster grid. The zip file also contains associated metadata.
{kind=link}