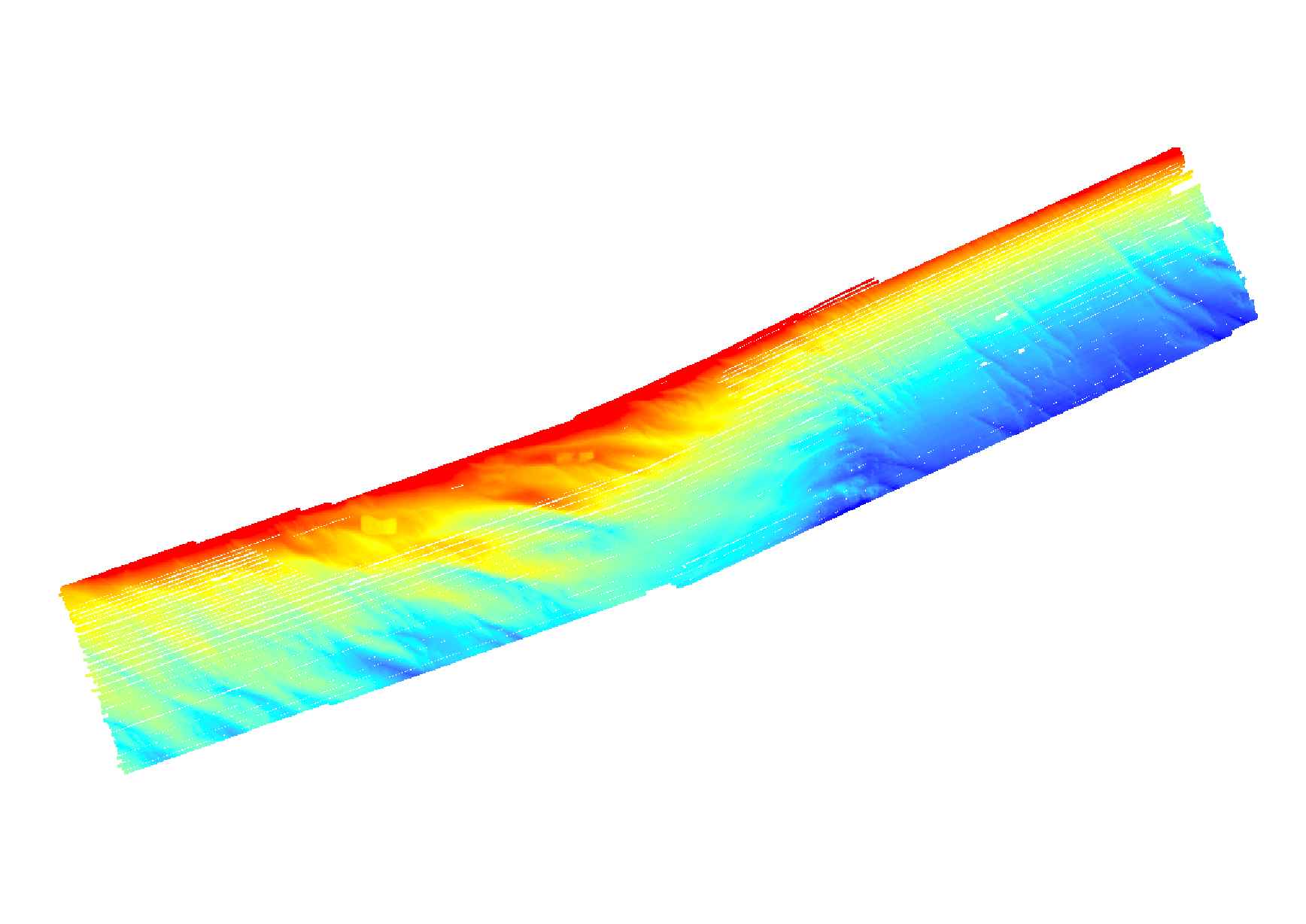
This grid represents gridded bathymetric data with no interpolation to infill data gaps between adjacent tracklines.
Line 1 - 51, 61 - 64, 68 - 87, and 93 - 109 were used to generate the bathymetric grid. Lines 52-60, 65 - 67, and 89 - 92 are tie lines collected orthogonal to the shoreline. Tie lines were used to QA/QC the bathymetric data during data processing, but were not incorporated into the final bathymetric grid.
Horizontal_Positional_Accuracy:
Horizontal_Positional_Accuracy_Report:
Navigation was acquired with Differential Global Positioning System and Wide Area Augmentation System (DGPS+WAAS), which is accurate to + or - 1 to 2 meters, horizontally. The forward, or primary, Coda Octopus F180R Attitude and Positioning system antenna was used to acquire DGPS data and transmit via a network connection to the SEA SWATHplus data acquisition software. The F180R Attitude and Positioning system uses 2 L1 antennas for position and heading and an Inertial Measurement Unit (IMU) for motion sensing (heave, pitch, roll and yaw). The F180R IMU is mounted directly above the SEA SWATHplus-M transducers on the side mount. The F180R antennas are mounted at the top of the sidemount offset in a forward/aft configuration. The offsets were applied within the SWATHplus and Coda Octopus F180R acquisition software.
Vertical_Positional_Accuracy:
Vertical_Positional_Accuracy_Report:
Vertical accuracy of the raw data based on system specifications may approximate 1% of water depth, approximately 0.1 to 0.3 meters within the survey area. However, overall vertical accuracies on the order of 50 cm are assumed based on the following considerations: The Coda Octopus F180R Attitude and Positioning system, used to correct for vessel roll, pitch, heave, and yaw, has a theoretical vertical accuracy of a few mm. Real Time Kinematic (RTK) GPS height corrections, broadcast from a continuously operated reference station (CORS) at Central Islip, New York (station NTCI), were used to reference soundings to the North American Vertical Datum of 1988 (NAVD88) and remove water depth variations caused by tides. USGS field tests (unpublished) using submerged targets suggest that the vertical accuracy of the RTK-GPS tidal correction is less than 30cm. Refraction artifacts were minimized by acquiring sound velocity profiles with an ODIM MVP30 moving vessel profiler. However, the ODIM MVP30 failed half-way through the survey. No sound velocity profiles were collected for the remainder of the survey (lines 48 - 109) and refraction corrections were applied during post-processing.
Changes in ship draft due to water and fuel usage were not considered.
Source_Information:
Source_Citation:
Citation_Information:
Originator: U.S. Geological Survey
Publication_Date: Unpublished Material
Title: Raw Bathymetric Data
Type_of_Source_Media: disk
Source_Time_Period_of_Content:
Time_Period_Information:
Range_of_Dates/Times:
Beginning_Date: 20110520
Ending_Date: 20110608
Source_Currentness_Reference:
ground condition during 20110520 - 20110523; 20110525 - 20110601; 20110604 - 20110608
Source_Citation_Abbreviation: none
Source_Contribution:
Survey: Survey lines were run at an average speed of 5 knots. Lines 1 through 27 were run at a 75-m line spacing to achieve full coverage of the seafloor in a priority area of interest in the nearshore, in water depths less than 15 meters. Lines 28 through 109 were run at a 150-m line spacing, with the exception of tie lines (lines 52 through 60, 65 through 67, 89 through 92), which were run at approximately a 2-km line spacing.
Sonar: Swath-bathymetric and acoustic-backscatter data were acquired with a SEA, Ltd., SWATHplus-M interferometric sonar operating at a frequency of 234 kHz and a variable range (increased or decreased manually depending on water depth). The system was operated with a transmit power: 80 percent, 4096 samples per channel, and a variable range (increased or decreased depending on water depth). The SWATHplus-M was mounted on the port side of the M/V Scarlett Isabella during survey operations. A Coda Octopus F180R Attitude and Positioning system recorded ship motion (heave, pitch, roll, and yaw). These data were transmitted via network connection to the SWATHplus-M acquisition software. The Octopus F180R Inertial Measurement Unit (IMU) was mounted directly above the SEA SWATHplus-M transducers, to minimize lever arm offsets that can lead to positioning errors. The F180R uses two L1 antennas for position and heading accuracy. The antennas are mounted on a rigid horizontal pole, positioned at the top of the sidemount, with a horizontal separation of 1 meter and are offset from the IMU in a forward/aft configuration. The forward offset of the primary antenna from the IMU is 0.5 meters, with no port/starboard offset.
Sound Velocity Profiles: 135 sound velocity profiles were acquired during survey operations at roughly 1 to 3 hour intervals using an Odim Brooke Ocean MVP30 motion vessel profiler. The MVP30 failed during survey operations. Sound velocity profiles were only collected during JD140 through 149 (lines 1 through 47).
While much effort was devoted to cleaning the data and minimizing survey artifacts, some artifacts may still be seen in the final gridded data including an along track artifact at nadir (the ship track) and at the far edges of a survey line in areas where adjacent swaths overlap. These artifacts are especially noticeable in areas of little local relief.
Process_Step:
Process_Description:
Converting Raw (SXR) to Field-Processed (SXP) Files:
Raw SXR bathymetry data were acquired with the SEA SWATHplus acquisition software (version 3.07) and used to generate field-processed SEA SWATHplus SXP files. The following information was stored within the SWATHplus session files and applied to the raw bathymetric soundings: 135 sound velocity profiles to minimize refraction artifacts due to fluctuations from the speed of sound in the water column (lines 1 - 47 only; no corrections were applied to lines 48 - 109 due to MVP30 system failure), roll offsets calculated during pre-survey patch test, draft of the transducer below the water line, and the measured angles and relative positions of the swath bathymetric transducers. The SWATHplus acquisition software applies the pitch, roll, heave, yaw and heading data supplied by the F180R IMU, to compensate depth solutions across the swath for any ship motion.
Several bathymetric filters were applied to remove erroneous soundings and reduce the density of the data. Bathymetric filtering typically included low amplitude (110%), range (0-3m), phase confidence (55%), box (2 -40m depth, 0.5 -75m horizontal), median (window size 5), water column (10%), alongtrack 1 (depth difference of 3-m, window size 3-m, and learn rate of 0.6), and mean filters (0.25m). These represent the typical parameters used for the majority of the USGS survey although the values may have been adjusted slightly for specific parts of the survey area.
Jane F. Denny performed this and all subsequent process steps.
Process_Date: 2014
Process_Contact:
Contact_Information:
Contact_Person_Primary:
Contact_Person: Jane F. Denny
Contact_Organization: U.S. Geological Survey
Contact_Position: Geologist
Contact_Address:
Address_Type: mailing and physical address
Address: 384 Woods Hole Road
City: Woods Hole
State_or_Province: Massachusetts
Postal_Code: 02543
Country: USA
Contact_Voice_Telephone: 508-548-8700 x 2311
Contact_Facsimile_Telephone: 508-457-2311
Contact_Electronic_Mail_Address: jdenny@usgs.gov
Process_Step:
Process_Description:
Navigation:
Tide files were created during post-processing using one- or two-minute interval averages of the RTK tide data recorded in the "TID" message string of the HYPACK navigation file for each line. The TID messages from DEV 1 (which was the NovAtel DL-V3 receiver) were used to extract the tide offset values using a shell script called getNovatelTides and an AWK script called parseHypackNovatelTides.awk
Process_Date: 2014
Process_Step:
Process_Description:
Processing data within CARIS:
A new CARIS HIPS project (version 7.1) was created with projection information set to Universal Transverse Mercator (UTM) Zone 18N, WGS84. Each SWATHPlus processed file (sxp) was imported to the new CARIS project using the Import/Conversion Wizard. A 5 meter resolution Bathymetric and Statistical Error (BASE) Surface was created and reviewed for any inconsistencies or data anomalies. Navigation was reviewed and edited as needed using the navigation editor tool. A 'tide' file, representing water elevations referenced to NAVD88, was loaded into CARIS and merged with each line to apply a correction for tidal variations throughout the survey. The BASE surface was recomputed to incorporate the new tide information. Beam-to-beam slopes and across track angle filters were applied to the soundings line by line and each line was further hand-edited using Swath Editor. The refraction editor was used to adjust sound speed values in areas where velocimeter data did not adequately correct for changes in the speed of sound through the water column (lines 1 - 47), or where no velocimeter data were collected (lines 48 - 109).
The final surface was exported in ASCII format (xyz - easting, northing, depth) using the Export Wizard, Export BASE Surface to ASCII.
Process_Date: 2014
Process_Step:
Process_Description:
ArcGIS:
ArcGIS 9.3.1, Tools, Add XY data (WGS 1984, UTM, Zone 18N) was used to add the data as an event theme to the ArcGIS project file. The event theme was loaded into the view and then exported (Data - Export Data) as a shapefile. Conversion Tools, To Raster, Point to Raster was then used to convert the point shapefile to a raster. Depths in the resulting grid were positive values. To convert these to negative depths, Raster Calculator was used (grid * -1) and the output saved in Esri grid format: fi_bathy5m.
Process_Date: 2014
Process_Step:
Process_Description:
The online links to the data were updated to reflect the new server hosting the data. Additionally, other small edits could be made to the metadata, such as modifying http to https where appropriate. The metadata date (but not the metadata creator) was edited to reflect the date of these changes.
Process_Date: 20170418
Process_Contact:
Contact_Information:
Contact_Organization_Primary:
Contact_Organization: U.S. Geological Survey
Contact_Person: VeeAnn A. Cross
Contact_Position: Marine Geologist
Contact_Address:
Address_Type: Mailing and Physical
Address: 384 Woods Hole Road
City: Woods Hole
State_or_Province: MA
Postal_Code: 02543-1598
Contact_Voice_Telephone: 508-548-8700 x2251
Contact_Facsimile_Telephone: 508-457-2310
Contact_Electronic_Mail_Address: vatnipp@usgs.gov
Process_Step:
Process_Description: USGS Thesaurus keywords added to the keyword section.
Process_Date: 20180720
Process_Contact:
Contact_Information:
Contact_Organization_Primary:
Contact_Organization: U.S. Geological Survey
Contact_Person: VeeAnn A. Cross
Contact_Position: Marine Geologist
Contact_Address:
Address_Type: Mailing and Physical
Address: 384 Woods Hole Road
City: Woods Hole
State_or_Province: MA
Postal_Code: 02543-1598
Contact_Voice_Telephone: 508-548-8700 x2251
Contact_Facsimile_Telephone: 508-457-2310
Contact_Electronic_Mail_Address: vatnipp@usgs.gov
Process_Step:
Process_Description:
Added keywords section with USGS persistent identifier as theme keyword.
Process_Date: 20200908
Process_Contact:
Contact_Information:
Contact_Organization_Primary:
Contact_Organization: U.S. Geological Survey
Contact_Person: VeeAnn A. Cross
Contact_Position: Marine Geologist
Contact_Address:
Address_Type: Mailing and Physical
Address: 384 Woods Hole Road
City: Woods Hole
State_or_Province: MA
Postal_Code: 02543-1598
Contact_Voice_Telephone: 508-548-8700 x2251
Contact_Facsimile_Telephone: 508-457-2310
Contact_Electronic_Mail_Address: vatnipp@usgs.gov
{kind=link}