Source_Citation:
Citation_Information:
Originator: U.S. Geological Survey
Publication_Date: unpublished material
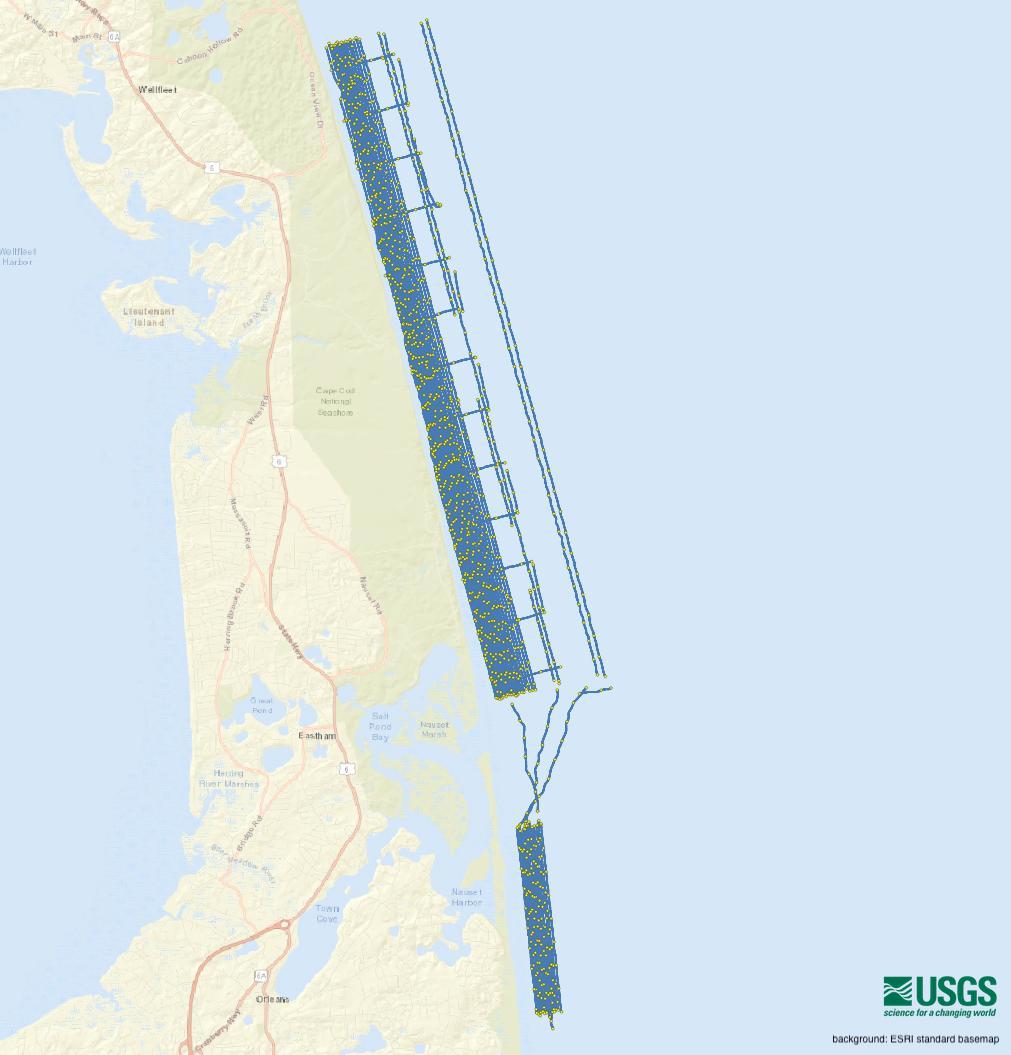
Title: SB-424 SEG-Y trace data
Geospatial_Data_Presentation_Form: SEG-Y
Type_of_Source_Media: disc
Source_Time_Period_of_Content:
Time_Period_Information:
Range_of_Dates/Times:
Beginning_Date: 20210609
Ending_Date: 20210624
Source_Currentness_Reference: ground condition
Source_Citation_Abbreviation: SEG-Y SB-424 data
Source_Contribution:
The EdgeTech SB-424 subbottom profiler tow vehicle was pole mounted on the port aft quarter of the RV Rafael. The transducers were 1 m below the water line, and approximately 1 meter astern of the DGPS antenna mounted on the cabin top. Chirp seismic data were collected using an EdgeTech Geo-Star FSSB sub-bottom profiling system and an SB-424 towfish. SonarWiz 7 (version 7.07.06) seismic acquisition software was used to control the Geo-Star FSSB topside unit, digitally log three trace data (envelope, real, and imaginary) in the SEG-Y Rev. 1 format (IEEE floating point), and record GPS navigation coordinates to the SEG-Y trace headers (in arc seconds of Latitude and Longitude, multiplied by a scalar of 100). SonarWiz recorded heave values from the heave, pitch, and roll data that came from the POSMV IMU to the SEG-Y header bytes 189-190 as 16-bit integer in cm*10 units. Data were acquired using 25-ms shot rates, a 10-ms pulse length, and a 4 to 20 kHz frequency sweep. Traces were recorded with a 23-microsecond sample interval with a trace length of 100 ms.
Process_Description:
PROCESS STEP 1:
Shearwater Reveal (version 4.1), and Python 2.7.6 were used to process SEG-Y data and extract navigation data. The processing flows and scripts used are summarized below and in the following processing steps.
1) The Reveal flow 001_ read424_segy.flow called the module SegyTapeRead that reads the raw SEG-Y files containing the envelope, real, and imaginary trace data. The following SEG-Y trace headers were mapped and saved as Reveal headers: FFID, Channel, Source X and Y, Year, Day, Hour, Minute, Second, and Heave (derived from POS MV IMU) in bytes 189-190 (16-bit integer). HeaderMath and UTMLatLong converted the navigation reference point (NRP) lat/lon positions from seconds of arc to decimal degrees, projected them to UTM Zone 19N WGS 84 meters, and wrote each to new header words (NRP_LAT, NRP_LON, NRP_X, and NRP_Y). Finally, Output wrote the envelope-detected traces and the real traces to separate new files '*.seis' in the internal Reveal format.
2) The Reveal flow 002_layback_stat.flow applied static corrections to account for a draft depth (1 m) of the SB-424 pole-mounted tow vehicle and to remove heave. The heave from the Reveal header Heave (cm*10) was converted using HeaderMath to two-way travel time (TWT) milliseconds (ms) by dividing by -750 (assumes a velocity of 1500 m/s and account for negative values are down in the POSMV data). ApplyStatic shifted the trace data from the converted TWT heave values. File MB_Line-0001, MB_Line-0002, MB_Line-0003, MB_Line-0003a, MB_Line-0003b. MB_Line-0004, MB_Line-0004a, and MB_Transit-0001 did not have values for heave in the raw SEG-Y files. For these files, a custom Python module ObspyPicking was used to pick the sea floor. HeaderFiltering was used to apply a 51 trace smoothing filter to the sea floor picks. ApplyStatic used the difference between the picked sea floor and the smoothed sea floor was used to shift and remove heave effects.
The Reveal flow 002_layback_stat.flow also applied the custom Python module ShotlineLayback (developed by Nathan Miller of USGS-WHCMSC) defined the horizontal offset between the GPS antenna and the pole-mounted SB-424( approximately 1 m astern). The algorithm interpolated a sail line from the navigation reference point positions (NRP_X and NRP_Y), then computed layback positions for the shots by translating them back along the sail line by the total offset and wrote the calculated layback positions to new header words (SRC_X, SRC_Y, REC_X, REC_Y). UTMLatLong converted the layback positions from UTM Zone 19N WGS 84 meters to decimal degrees and wrote each to new header words (NRP_LAT, NRP_LON, SRC_LAT, SRC_LON, REC_LAT, and REC_LON). HeaderMath converted the layback REC_LAT and REC_LON values from decimal degrees to seconds of arc with a scalar of 100, and set header words for navigation coordinate units (geographic seconds of arc with scalar) and time basis code (UTC). Output wrote the processed traces to new SEG-Y and Reveal seis format files that included static corrections and layback positions.
3) The static and layback corrected SEG-Y files were imported to Kingdom Suite (v. 2017) using the layback navigation. The sea-floor reflection was picked using 2Dhunt and manually edited when needed. The picked sea floor was exported as CSV files with columns File Name, FFID, and two-way travel time. Grep was used to select individual records by File Name and write individual CSV files for each file. The Reveal flow 003_chirp_gain used the module DBMerge matched FFID in the CSV files with the Reveal FFID headers and created a new Reveal header for the sea floor picks (SFTWT). HeaderMath converted the SFTWT two-way travel time in seconds to a new header SFTWT_MS in milliseconds (ms).
4) The Reveal module TraceMath applied a time-dependent gain function relative to the header SFT_MS. TraceMath supports the special variables SAMPLE and TIME where SAMPLE is the value of each input sample and the variable TIME to the z coordinate of the trace in ms. The following equation was applied: sample = ifelse(TIME > SFTWT_MS - 3, sample * pow((TIME-(SFTWT_MS-3))/1000,1), 0) The function pow(a, b) where a=TIME-(SFTWT_MS-1)/1000 is raised to the power of b (1). New SEG-Y and Reveal files were written with the gain function applied.
5) A Seismic Unix (version 4.2) script read424 was used to read the gain applied SEG-Y files with the gain function applied. The layback corrected coordinates were extracted from SEG-Y headers and written to a Seismic Unix file. Along with the extracted coordinates, other SEG-Y trace header information, including shot number, year, Julian day, and time of day (UTC) were extracted. Header information from each SEG-Y file was saved to text files after an AWK (no version) filter was used to maintain the first and last shots, shots at multiples of 500 and shots with unique navigation coordinates. Geographic coordinates (WGS 84) were converted to UTM zone 19 N coordinates (WGS 84) using Proj (version 4.6.0). End shots and shots at multiples of 500 may not have unique navigation coordinates. Separate text files containing the first and last shots and even 500 shot intervals were also saved. A 500 shot interval was chosen because it corresponds to the annotation interval provided along the top of the seismic-reflection profile images. Read424 called a Python script 424itoSQL_21004.py, written by Wayne Baldwin, which imported the CSV files to a Spatialite (version 4.3.0) enabled SQLite (version 3.21.0) database, creating three tables containing point geometries for the unique and 500 shotpoint navigation and trackline features.
These process steps and all subsequent process steps were conducted by the same person - David S. Foster.
Process_Date: 20220304
Process_Contact:
Contact_Information:
Contact_Organization_Primary:
Contact_Organization: U.S. Geological Survey
Contact_Person: David S. Foster
Contact_Position: Geologist
Contact_Address:
Address_Type: mailing and physical address
Address: 384 Woods Hole Rd.
City: Woods Hole
State_or_Province: MA
Postal_Code: 02543-1598
Contact_Voice_Telephone: (508) 548-8700 x2271
Contact_Facsimile_Telephone: (508) 457-2310
Contact_Electronic_Mail_Address: [email protected]
Process_Description:
PROCESS STEP 2:
The SB-424 500 shot and trackline features were added (Add Data) into ArcGIS Pro (version 2.4.1) from the SQLite database, then exported with the Geoprocessing, Feature Class To Shapefile tool to new Esri polyline shapefiles '2021-004-FA_SB424_sht500.shp' and '2021-004-FA_SB424Tracklines.shp', respectively.
Process_Date: 20220304
{kind=link}