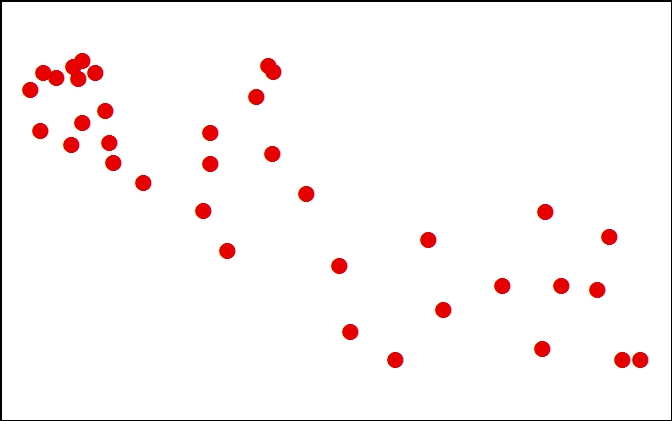
All bottom photographs were collected in 2005 with the mini-SEABOSS (SEABed Observation and Sampling System, Blackwood and Parolski, 2001) by the U.S. Geological Survey within the Moultonborough Bay, Lake Winnipesaukee, New Hampshire, study area.
Forty sample locations were occupied, however bottom photographs were not collected at sample locations 1, 2, 20 and 24 because the dive lights that are used to illuminate the lakefloor in order to take a photograph, failed. We were not able to successfully image the lakefloor with the digital camera at these sample locations. Once new lights were installed, we were able to resume collection of bottom photographs.
Horizontal_Positional_Accuracy:
Horizontal_Positional_Accuracy_Report:
Navigation was acquired with Wide Area Augmentation System (WAAS), which is accurate to + or - 1 to 2 meters, horizontally. Navigation data were acquired with a Communications Systems International (CSI), Inc. LGBX Pro receiver. The CSI LGBX Pro received positions from a WAAS antenna located on the port, aft roof of the R/V Rafael cabin. WAAS positions were recorded within HYPACK (www.hypack.com) navigation software. Offsets between the DGPS antenna and the mini-SEABOSS were not measured. The horizontal position of the mini-SEABOSS during sample collection is assumed to be +/- 10 meters at best, due to a lack of precise positional data at the time of sample recovery.
Source_Information:
Source_Citation:
Citation_Information:
Originator: U.S. Geological Survey
Publication_Date: Unpublished Material
Title: Bottom Photographs
Type_of_Source_Media: online
Source_Time_Period_of_Content:
Time_Period_Information:
Range_of_Dates/Times:
Beginning_Date: 20050727
Ending_Date: 20050728
Source_Currentness_Reference: ground condition of field activity
Source_Citation_Abbreviation: none
Source_Contribution:
The Mini SEABOSS was designed specifically for the USGS Woods Hole Science Center's 26-foot research vessel Rafael. This system is equipped with two video cameras, a digital still camera, and a Van Veen grab sampler. This system, weighing approximately 200 lbs., can be used to depths up to 40 meters. The grab itself is raised and lowered with a 3/16-inch Aramid fiber winch-line with a breaking strength of 5,600 pounds. The davit is secured when the Mini SEABOSS is in the water. The electrical cable is on a spring-wound take-up reel with electrical slip rings that is mounted aft of the sampler. This arrangement protects the 0.38-in. multi-conductor cable and keeps the Mini SEABOSS correctly oriented with the boat. This multi-conductor cable enables communication between the ship's lab and the Mini SEABOSS system. The digital camera, a Minolta Dimage 7Hi, is mounted in a machined Delrin housing with a flat port and is set for 2560 x 1920 pixel images at the "fine" setting for compression. This allows the camera to be used for over 200 images with a 1 GB Compact Flash card without downloading. The system also has a 50 Watt/second flash unit powered by 8 AA batteries. Two battery-powered lasers are set 15 cm apart for scale measurements. The red laser dots can usually be seen in the photo depending on the bottom type and the distance to the sea floor. A third battery powered laser is positioned at an angle so that when it intersects the other lasers, the Mini SEABOSS is at the optimum height off the bottom for a still photograph (optimal height is generally 75 cm above the bottom). The camera is set to a manual focus and set to a default focus distance (50 cm) once the camera is powered up. The default focus distance is slightly less than the optimum height above the seafloor to account for optical distortion under water.
Video images were collected at 40 sample locations and digital photographs were collected at 36 of the 40 sample locations using the USGS Mini SEABOSS (Blackwood and Parolski, 2001). The sample locations were selected based on variation in the acoustic backscatter within the sidescan-sonar mosaic, with the objective of characterizing broad areas of different backscatter intensity. With the Mini SEABOSS deployed, the research vessel was allowed to drift with occasional power from the vessel to control drift direction. Video was collected over a total of 696 meters of lakefloor. Video drift position was derived from the HYPACK navigation files based on the start and end times of the drift. For some portions of the drift, there was no navigation, so the position was derived from the time and position in the video at 30-s intervals. Latitude and Longitude for sample locations 1 and 8 were derived solely from the video as HYPACK files were not saved to disk at these sample locations. Bottom photographs were generally taken immediately prior to collecting a sediment sample with the SEABOSS. A unique navigation position was not recorded when the bottom photographs were collected, however the time of photo collection was recorded.
Grab samples of the surficial sediment were collected at 39 sample locations, typically at the end of a drift. Sample location 26 was not sampled, as the sediment was too coarse (boulders). However, bottom photographs and video were collected. The upper 2 cm of sediment was scraped from the surface of sediment samples for texture analysis. At sample locations 1 and 7, two sub-samples were collected due to the apparent bi-modal nature of the lakefloor and sample. One sub-sample was collected from the upper 2 cm, and the 2nd sub-sample was collected from the base of the sample (2 to 10 cm depth). (Two individual sites were occupied at Station 1, whereas only one site was occupied at Station 7. The one sample collected at Station 7 was subsequently sub-sampled). Sediment samples were collected at locations with relatively fine-grained sediment (sand or mud). Samples were not collected in gravel or cobble areas where gravel prevented full closure of the sampler and resulted in a washed-out sample (sample location 26).
A total of 41 bottom samples were submitted for grain-size analysis. Grain-size analysis was performed at the USGS Sediment Laboratory at WHCMSC using methods described by Poppe and others (2005).
Note: A small bit of water entered the camera housing during survey operations. This is reflected as a blurred 'dot' on the bottom photographs. The camera remained operational and data collection continued despite the 'water mark'.
Process_Step:
Process_Description:
Bottom photographs were collected with the mini SEABOSS (Blackwood and Parolski, 2001) at 36 sample stations in Moultonborough Bay, Lake Winnipesaukee, New Hampshire, 2005.
This and all subsequent processing steps were conducted by Jane F. Denny.
Process_Date: 2005
Process_Contact:
Contact_Information:
Contact_Person_Primary:
Contact_Person: Jane F. Denny
Contact_Organization: U.S. Geological Survey
Contact_Position: Geologist
Contact_Address:
Address_Type: mailing and physical address
Address: 384 Woods Hole Road
City: Woods Hole
State_or_Province: Massachusetts
Postal_Code: 02543
Country: USA
Contact_Voice_Telephone: 508-548-8700 x2311
Contact_Facsimile_Telephone: 508-457-2310
Contact_Electronic_Mail_Address: [email protected]
Process_Step:
Process_Description:
The digital images were recorded on a compact flash card within the camera. Digital images were downloaded to a local disk and stored with a naming convention based on the station location. For example, sta11.jpg, is a bottom photograph collected at station (i.e. sample location) 11. Generally, only one bottom photograph was collected at each sample location. Nero Multimedia Software (version 2005) was used for the transfer and file naming.
Process_Date: 2005
Process_Step:
Process_Description:
The time each bottom photograph was taken was stored in the EXIF header of the JPEG image. Python scripts were used to extract the times from the EXIF headers (JPEG_exifextract_gui_sort.py), parse the navigation from the raw HYPACK files for each Julian Day (parseHypackFolder_gui_sort_all.py), and use the HYPACK navigation to assign a unique latitude and longitude position for each photograph by matching the time in the EXIF header with time in the raw HYPACK data and generating a point shapefile showing locations (Photo_locs_gui3.py). The results revealed an offset in the location of the bottom photographs relative to the location of the grab samples, and in some cases, offsets of 10's of meters from the location of the video track.
In order to QC the times stored in the EXIF header to determine if the position discrepancy was due to an offset in time (incorrect times stored in EXIF headers), the video data collected at each sample location was reviewed to identify the time at which the bottom photograph was taken. The flash of the digital camera as the bottom photograph is taken is clearly visible in the video data. DGPS position and time are displayed on the video data, and were manually recorded at the time of the flash. By comparing the time in the EXIF header to the time in the video data, an offset of 3 minutes 20 seconds was identified The time in the EXIF header was 3 minutes 20 seconds earlier than the time in the video data. This time offset resulted in incorrect positions being associated with each bottom photograph. To rectify this issue, the times in the EXIF headers of the JPEG images were edited to correct the 3 minute 20 second offset.
The photo_locs_gui3.py was re-run, entering the time offset in the format HHH:MMM:SS (00:03:20). One image, sta8.jpg, did not have navigation recording during the time the photo was taken. Subsequently, the location for that image is based on the closest time available from the navigation file.
In ArcMap 9.3, the attribute Cruise_ID and System were added to the shapefile.
Process_Date: 2013
Process_Step:
Process_Description:
Using XTools Pro, version 7.1.0 in ArcMap 9.3.1, the shapefile was exported to a comma-delimited text file: 2005-004-FA_photos.csv. All of the attributes were exported except FID.
Source_Used_Citation_Abbreviation: 2004-004-FA_photos.shp
Process_Date: 2014
Source_Produced_Citation_Abbreviation: 2004-004-FA_photos.csv
Process_Step:
Process_Description:
The online links to the data were updated to reflect the new server hosting the data. Additionally, other small edits could be made to the metadata, such as modifying http to https where appropriate. The metadata date (but not the metadata creator) was edited to reflect the date of these changes.
Process_Date: 20170406
Process_Contact:
Contact_Information:
Contact_Organization_Primary:
Contact_Organization: U.S. Geological Survey
Contact_Person: VeeAnn A. Cross
Contact_Position: Marine Geologist
Contact_Address:
Address_Type: Mailing and Physical
Address: 384 Woods Hole Road
City: Woods Hole
State_or_Province: MA
Postal_Code: 02543-1598
Contact_Voice_Telephone: 508-548-8700 x2251
Contact_Facsimile_Telephone: 508-457-2310
Contact_Electronic_Mail_Address: [email protected]
Process_Step:
Process_Description: USGS Thesaurus keywords added to the keyword section.
Process_Date: 20180720
Process_Contact:
Contact_Information:
Contact_Organization_Primary:
Contact_Organization: U.S. Geological Survey
Contact_Person: VeeAnn A. Cross
Contact_Position: Marine Geologist
Contact_Address:
Address_Type: Mailing and Physical
Address: 384 Woods Hole Road
City: Woods Hole
State_or_Province: MA
Postal_Code: 02543-1598
Contact_Voice_Telephone: 508-548-8700 x2251
Contact_Facsimile_Telephone: 508-457-2310
Contact_Electronic_Mail_Address: [email protected]
Process_Step:
Process_Description:
Added keywords section with USGS persistent identifier as theme keyword.
Process_Date: 20200908
Process_Contact:
Contact_Information:
Contact_Organization_Primary:
Contact_Organization: U.S. Geological Survey
Contact_Person: VeeAnn A. Cross
Contact_Position: Marine Geologist
Contact_Address:
Address_Type: Mailing and Physical
Address: 384 Woods Hole Road
City: Woods Hole
State_or_Province: MA
Postal_Code: 02543-1598
Contact_Voice_Telephone: 508-548-8700 x2251
Contact_Facsimile_Telephone: 508-457-2310
Contact_Electronic_Mail_Address: [email protected]
{kind=link}